
- Stredná pozdĺžna rovina vozidla. Je to rovina kolmá k základnej rovine, na ktorej vozidlo stojí. Prechádza stredom rozchodov prednej a zadnej nápravy. Leží v nej stredná pozdĺžna os (os symetrie vozidla).
- Priama jazda. Postavenie kolies prednej nápravy ako „priama jazda“ je pomocné postavenie, ktoré sa využíva pri meraní geometrie zadnej nápravy. Predné kolesá majú rovnakú delenú zbiehavosť ku strednej pozdĺžnej osi vozidla.
- Geometrická jazdná os. Geometrická jazdná os, je os poliaca uhol celkovej zbiehavosti kolies zadnej nápravy. Od strednej pozdĺžnej osi symetrie sa líši, ak nie je os zadnej nápravy kolmá na stredovú pozdĺžnu osu. Hovoríme vtedy o šikmom postavení zadnej nápravy. Toto šikmé postavenie určuje primárne smer pohybu vozidla. Rovno ide iba vtedy, keď sa natočením prednej nápravy kompenzuje šikmé postavenie tej zadnej. Vozidlo sa pohybuje „bokom“.
- Stredná rovina kolesa. Je rovina prechádzajúca stredom kolesa kolmá k osi jeho otáčania.
- Stopník – bod dotyku kolesa s vozovkou. Je priesečník osi roviny kolesa a miesta (bodu) styku kolesa s vozovkou.
- Zbiehavosť kolies α.
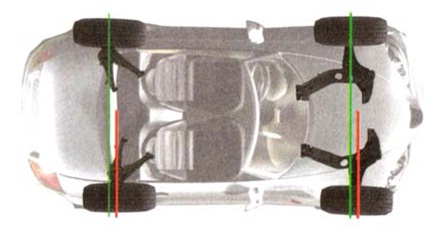
- Odklon kolesa γ.
- Príklon čapu riadenia δ.
- Záklon čapu riadenia τ.
- Závlek kolesa z.
- Presadenie kolies.
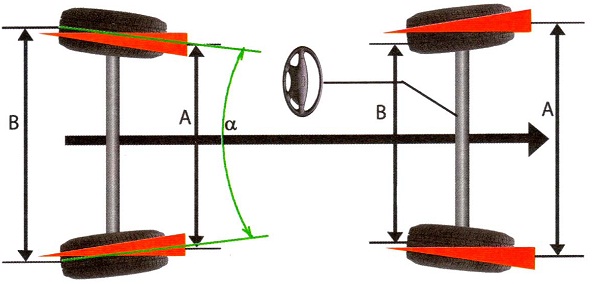
Zbiehavosť kolies α
Je definovaná ako rozdiel medzi dĺžkou A a B, meraná v milimetroch na ráfiku kolesa v úrovni stredu otáčania kolesa. Celková zbiehavosť je uhol, ktorý zvierajú stredné roviny protiľahlých kolies na jednej náprave. Hodnota zbiehavosti sa udáva pre všetky nápravy na vozidle. Ak je priesečník rovín pred vozidlom, potom ide o zbiehavosť. Naopak, ak je priesečník za vozidlom, jedná sa o rozbiehavosť. Vplyvom valivého odporu, poddajnosti riadenia a uchytenia je koleso počas jazdy natáčané do rozbiehavosti. Správne nastavená zbiehavosť prispieva k stabilite vozidla v priamom smere – zaisťuje tak ich paralelné odvaľovanie a tiež eliminuje kmitanie kolies spôsobené vôľami v riadení – axiálne zaťaženie kolesa. Nedá sa jednoznačne povedať, či má byť na vozidle nastavená kladná alebo záporná zbiehavosť. Trendom však je nastavenie zbiehavosti u vozidiel s hnacou zadnou nápravou. Pri vozidlách s pohonom prednej nápravy sa vo všeobecnosti stretávame s nulovou zbiehavosťou alebo zápornou – rozbiehavosť, kde sila pohonu spôsobuje sťahovanie kolies do stredu vozidla k pozdĺžnej ose. Meria sa v uhlových mierach (stupňoch a minútach), ale niekedy je udávaná v milimetroch na okrajoch ráfikov kolies. Pre prepočet platí vzorec:
sinα = (A − B) / d
kde rozdiel A-B označuje zbiehavosť v mm a d je priemer na vonkajšom okraji ráfiku kolesa v mieste merania.
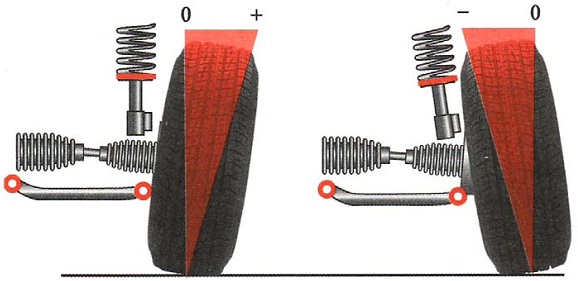
Odklon kolesa γ
Odklon kolesa je uhlom odklonu strednej roviny kolesa voči zvislej rovine kolesa. Odklon kolesa môže byť v statickej polohe pozitívny aj negatívny. Odklon kolesa považuje za kladný, ak sa koleso nakláňa vrchom von od stredu vozidla. Odklon kolesa spôsobuje, že normálová sila pôsobiaca na koleso sa rozkladá a vyvoláva trvalé axiálne zaťaženie ložiska kolesa v smere do (od) stredu vozidla a taktiež vyvoláva bočnú vodiacu silu medzi pneumatikou a vozovkou, čo spôsobuje smerovú odchýlku. Vplyvom odklonu kolesa tvorí odvaľujúce sa koleso s vozovkou kužeľ, čím kolesá pôsobia proti sebe a znižuje sa tým sklon ku kmitaniu riadenia pri jazde v priamom smere. Pri nezávislom zavesení sa v prípade prepruženia môže meniť veľkosť uhla odklonu kolesa. Z dôvodu tejto zmeny uhla odklonu otáčajúceho sa kolesa vzniká tzv. gyroskopický moment. Tento gyroskopický moment sa snaží otáčať koleso okolo osi otočného čapu, čo sa v praxi prejavuje rázom, resp. trasením volantu. Najvýraznejšie sa tieto negatívne pohyby volantu prejavujú pri prejazde nerovností, kedy musí vodič pevne držaž volant resp. vykonať korekciu smeru. Gyroskopický moment pri prepružení kolesa má vplyv aj na bočné nakláňanie karosérie, čo má za následok, že v prípade veľkej zmeny uhlu odklonu sa značne zvyšuje namáhanie zavesenia kolesa aj rámu. Z tohto dôvodu je nutná taká konštrukcia nápravy – zavesenia kolies, aby sa pri prepružení menil odklon kolesa čo najmenej a nevznikali tak spomínané nežiadúce javy.
Nastavením odklonu kolesa možno čiastočne upraviť aj nedotáčavosť alebo pretáčavosť vozidla a znížiť sklon ku kmitaniu kolies. Dôvod možno vidieť v priesečníku osi odkloneného kolesa a vozovky, po ktorej sa odvaľuje – vzniká kužeľ. Kolesá sa pri pozitívnom odklone majú snahu odvaľovať smerom k týmto priesečníkom a vytvoria sa momenty sily, ktoré pôsobia proti kmitaniu kolies. V bežnej premávke sa zvýšenie odklonu kolesa prejaví na rýchlom opotrebovaní krajných plôch behúňa pneumatiky.
Nastavenie odklonu kolesa:
- excentrickým prestavením uloženia priečnych ramien
- vyrovnávacími podložkami
- presúvaním guľového kĺbu riadenia v spodnom ramene zavesenia kolesa
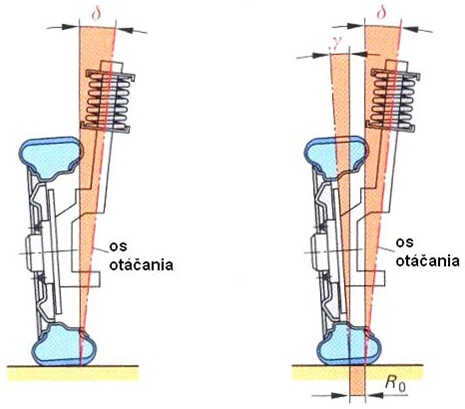
Príklon osi otočného čapu riadenia δ
Príklon osi čapu riadenia je uhol, ktorý zviera os otáčania čapu so zvislou rovinou kolesa premietnutý do priečnej roviny. Príklon čapu riadenia pôsobí spoločne s odklonom kolesa na udržovanie priameho smeru jazdy a ovplyvňuje ovládacie sily vrátane uhlu natáčania kolesa. Príklon osi otočného čapu riadenia spôsobuje klopný moment, ktorý stáča kolesá do priameho smeru – po prejazde vozidla zákrutou vracanie volantu (kolies) do nulovej polohy. Pri natočení kolies sa vplyvom príklonu zdvíha náprava, resp. hmota, ktorá na ňu pôsobí, čím sa zvyšuje sila potrebná k vytočeniu kolesa.
Polomer otočného čapu Ro
Jedná sa o vzdialenosť priesečníku osi otočného čapu riadenia s rovinou vozovky a stredovej polohy miesta, kde je kontak pneumatiky s vozovkou. Ak leží na vonkajšej strane od strednej roviny kolesa, je tento polomer považovaný ako záporný. S rastúcim polomerom otočného čapu rastie aj citlivosť nápravy na pozdĺžne sily. Ak sú tieto pozdĺžne sily rozdielne na pravom a ľavom kolese nápravy, musí účinky rozdielnosti síl vyrovnávať vodič vhodným otáčaním volantu. Častejšie sa používa záporný polomer otočného čapu, čím sú kolesá tlačená do zbiehavosti.
Záklon osi čapu riadenia τ
Záklon osi čapu riadenia je uhol, ktorý zviera os otáčania čapu so zvislou osou kolesa premietnuté do pozdĺžnej roviny vozidla. Pokiaľ je os čapu naklonená vzad a hodnota uhlu je kladná, jedná sa o záklon. V opačnom prípade – kedy je hodnota uhla záporná, hovoríme o tzv. predklone. Záklon osi čapu riadenia má na riadenie stabilizačný účinok, príliš veľký záklon však spôsobuje zvýšenie sily potrebenej na vychýlenie kolesa pri riadení. Pri vozidlách s predným pohonom je záklon blízky nule, pri pohone vozidla zadnou nápravou býva záklon niekoľko stupňov.
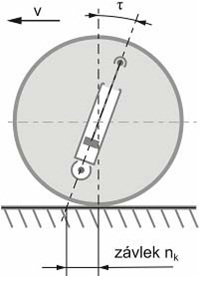
Závlek kolesa z
Je vzdialenosť medzi stredom styku pneumatiky a priesečníkom osi otočného čapu kolesa premietnuté do pozdĺžnej roviny vozidla. Ak je priesečník osi otočného čapu pred stredom styku pneumatiky s vozovkou, jedná sa o kladný závlek, ak je za stykom jedná sa o záporný závlek. Účelom závleku je stabilizácia kolesa – záporný závlek, kedy je pri jazde koleso tzv. vlečené a je viac stabilné. Tohto efektu sa využíva napríklad pri nákupných vozíkoch, kedy koliesko vozíka samo natáčané do vlečnej pozície vplyvom svojho valivého odporu.
Presadenie kolies
Presadením kolies sa rozumie uhol, ktorý zviera spojnica stopníkov kolies na jednej náprave s priamkou kolmou na geometrickú jazdnú osu. Za kladný sa považuje vtedy, keď pravé koleso je presadené dopredu. Udáva sa v dĺžkových mierach ale môžeme sa stretnúť aj s uhlovým vyjadrením.
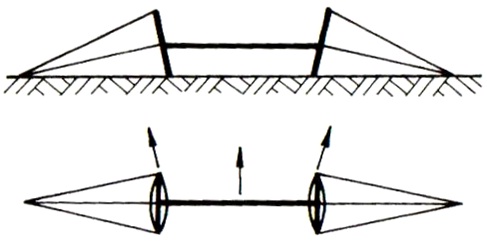
Polomer osi natáčania kolesa (ρ)
Je to vzdialenosť medzi priesečníkom stredovej roviny kolesa s vozovkou a priesečníkom osi otočného čapu riadenia s vozovkou. Ak leží priesečník osi otáčania bližšie k strednej pozdĺžnej rovine vozidla ako bod dotyku kolesa s vozovkou, potom sa jedná o kladný polomer osi otáčania. V opačnom prípade je záporný. Vozidlá s predným pohonom majú tento polomer nulový alebo záporný a to z dôvodu, aby sa zmenšili momenty prenášané do riadenia. Pri zápornom polomere natáčania totiž dochádza k tomu, že moment, ktorý pri brzdení otáča koleso okolo otočného čapu riadenia, má rovnakú orientáciu ako moment vyvolaný hnacou silou. Vďaka tomu nie sú čapy riadenia zaťažované striedavým zaťažením. Polomer natáčania kolesa umožňuje pretáčanie kolesa pri parkovaní, čo uľahčuje točenie volantom a znižuje ovládacie sily pôsobiace v riadení. Na druhej strane, čím je polomer osi otáčania väčší, tým je predná náprava citlivejšia na pôsobenie pozdĺžnych síl. Taktiež príliš veľký polomer vyvoláva pri brzdení príliš veľký moment snažiaci sa otočiť koleso okolo otočného čapu kolesa. Tým by spôsoboval aj veľké zaťažujúce sily v mechanizme riadenia, v prípade nerovnomerného brzdenia aj neriadené natáčanie kolesa vozidla.
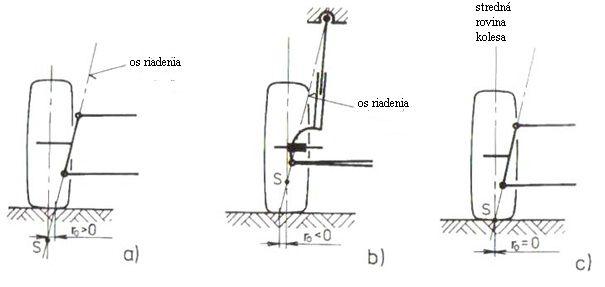
(a- kladný, b- záporný, c- nulový)
Smerová stabilita
Je citlivosť vozidla na vonkajšie podnety. Je to schopnosť vozidla prejsť priamu dráhu s čo najmenšími korekciami – pohybom volantu. Na základe odozvy vozidla na rušivý vplyv alebo impulz rozoznávame štyri druhy smerovej stability vozidla.
-
Asymptotická stabilita: pohyb vozidla sa po doznení rušivého vplyvu asymptoticky blíži pohybu vozidla pri vyváženom stave. Inými slovami sa vozidlo postupne stabilizuje do pôvodného smeru jazdy.
- Neutrálna stabilita: po doznení rušivého vplyvu sa vozidlo stabilizuje, ale v inom smere (pozdĺžne doľava alebo doprava).
- Divergentná nestabilita: rušivý vplyv spôsobuje aj po odznení rastúcu odozvu vozidla. To znamená, že vozidlo sa začne pohybovať po dráhe, ktorá sa čoraz viac vzďaľuje pôvodnému smeru – napr. kruhová dráha so zmenšujúcim sa polomerom.
- Kmitavá nestabilita: rušivý impulz spôsobí, že pohyb vozidla bude kmitavý okolo pôvodného smeru jazdy a s rastúcou amplitúdou vychýlenia.
MJ